
Corrado De Pascali et al. / Science Robotics, 2022
Итальянские инженеры разработали мягкий пневматический актуатор, который можно использовать в качестве базового элемента для искусственных мышц роботов.
Он изготавливается из полимерного материала с помощью 3D-печати и представляет собой мембрану с продольными складками. Нагнетая или откачивая воздух, его можно заставить сжиматься или растягиваться в продольном направлении до 30 процентов от первоначального размера. Для демонстрации работы актуаторов в составе искусственных мышц, инженеры собрали роборуку с подвижными пальцами и запястьем, которые приводятся в движение 18 актуаторами. Статья, описывающая разработку, опубликована в журнале Science Robotics.Пневматика давно используется в робототехнике для приведения роботов в движение. Первые пневматические искусственные мышцы из эластичных материалов, которые растягиваются или сокращаются под давлением воздуха, появились еще в 50-е годы. Несмотря на то, что за прошедшее время появилось множество вариантов этой технологии, ученые продолжают искать способы ее улучшения
Инженеры из Италии под руководством Коррадо Де Паскали (Corrado De Pascali) из Итальянского технологического института в Генуе разработали пневматический актуатор, который может стать базовым элементом искусственных пневматических мышц для роботов. Он представляет собой напечатанную из полимерного материала мембрану, напоминающую воздушный шар, поверхность которого состоит из симметрично расположенных продольных складок. При нагнетании давления его эластичная оболочка расширяется в поперечном направлении, в то время как в продольном актуатор, наоборот, сжимается. Это можно использовать для имитации сокращающихся мышечных волокон. Если же воздух откачивать из оболочки, то актуатор будет сжиматься в поперечном и растягиваться в продольном направлении.

(D) Режимы работы актуатора, продольное сокращение при нагнетании давления, пассивное растяжение под действием упругих сил и активное растяжение при откачке воздуха
Corrado De Pascali et al. / Science Robotics, 2022
Поделиться
Подбирая материал и его толщину, а также варьируя геометрию складок на мембране можно управлять характеристиками актуатора. Всего инженеры разработали три типа геометрии: оптимизированные под максимальное сжатие или растяжение и универсальную двунаправленную для актуатора, который способен эффективно действовать в двух направлениях в зависимости от того нагнетается в него воздух или откачивается. Образцы всех трех типов затем были напечатаны с помощью 3D-принтера из нескольких видов фотополимерных смол.

Три типа актуаторов: сжимающийся (C), двунаправленный (A), растягивающийся (E)
Corrado De Pascali et al. / Science Robotics, 2022
Поделиться
В изотонических испытаниях, при которых измерялась величина деформации актуатора в рабочем направлении при постоянной воздействующей силе, наибольшую величину сжатия продемонстрировал актуатор сжимающегося типа. При нагрузке в четыре ньютона его длина сократилась на 25 процентов от первоначальной величины. Универсальный актуатор показал способность сжиматься и растягиваться в диапазоне от 25 (сжатие) до 30 процентов (растяжение) в зависимости от значения давления. Примерно такую же величину удлинения зафиксировали и у актуатора, сконструированного только для растяжения при откачивании из него воздуха.
В зависимости от материала и величины нагнетаемого давления актуатор может поднимать вес превышающий его собственный в 1000 раз. Например, при давлении 0,2 бар четырех сантиметровый актуатор весом шесть грамм смог поднять гирю весом один килограмм. Другой актуатор аналогичного размера, но выполненный из более прочного полимера и весящий восемь грамм при давлении в три бар поднял груз весом восемь килограмм, сократившись в продольном направлении на ту же величину, что и первый — около 20 процентов, что сравнимо с величиной сокращений настоящих скелетных мышц.

(A) Актуатор весом 6 грамм поднимает груз весом 1 килограмм, (B) актуатор аналогичного размера из более прочного полимера способен поднять вес 8 килограмм (при более высоком давлении); (C) технология легко масштабируется и позволяет создавать актуаторы разных размеров в зависимости от задачи
Corrado De Pascali et al. / Science Robotics, 2022
Поделиться
По словам инженеров отдельные актуаторы можно использовать в качестве базовых элементов для построения искусственной пневматической мускулатуры. Для этого их можно располагать последовательно в цепочках, которые затем можно объединять в мышечные группы. Для того чтобы продемонстрировать основные возможности такого подхода, разработчики напечатали из фотополимера роборуку за один проход одновременно вместе с встроенными в нее группами из 18 актуаторов. Указательный, средний, безымянный пальцы, а также мизинец сгибаются под действием мышц в виде цепочек из трех последовательно соединенных актуаторов. Большой палец приводится в движение группой из двух актуаторов. В запястье манипулятора расположено четыре двунаправленных актуатора, благодаря которым рука может наклоняться в разные стороны.
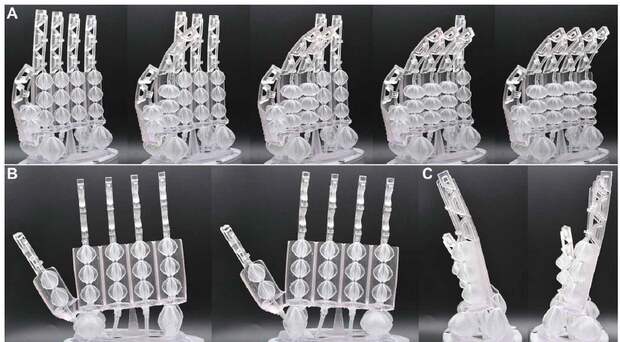
Пневматическая рука с 18 актуаторами может двигать каждым пальцем по отдельности и наклоняться в разные стороны за счет работы четырех двунаправленных актуаторов в запястье
Corrado De Pascali et al. / Science Robotics, 2022
Поделиться
В будущем разработчики планируют сосредоточиться на постройке более сложной системы искусственных мышц из большего числа элементов, а также поэкспериментировать с другими возможно более эффективными материалами для них.
Ранее мы рассказывали об американских инженерах, которые использовали технологию, позволяющую печатать одновременно несколькими фотополимерами, для создания пневматической роборуки, пальцы которой управляются с помощью элементов струйной логики.
Андрей Фокин
Свежие комментарии